Experiment Overview
Position control is fundamental to flight control actuators, robotic arms, gimbal systems, and telescope pointing mechanisms. The challenge is achieving a fast, accurate step response while also tracking continuously-changing reference inputs (like a ramp command) without accumulating position error. This lab designed and implemented a PV controller meeting second-order transient specifications, then demonstrated why adding an integral term is necessary to eliminate the persistent error that appears when the system must track a ramp reference.
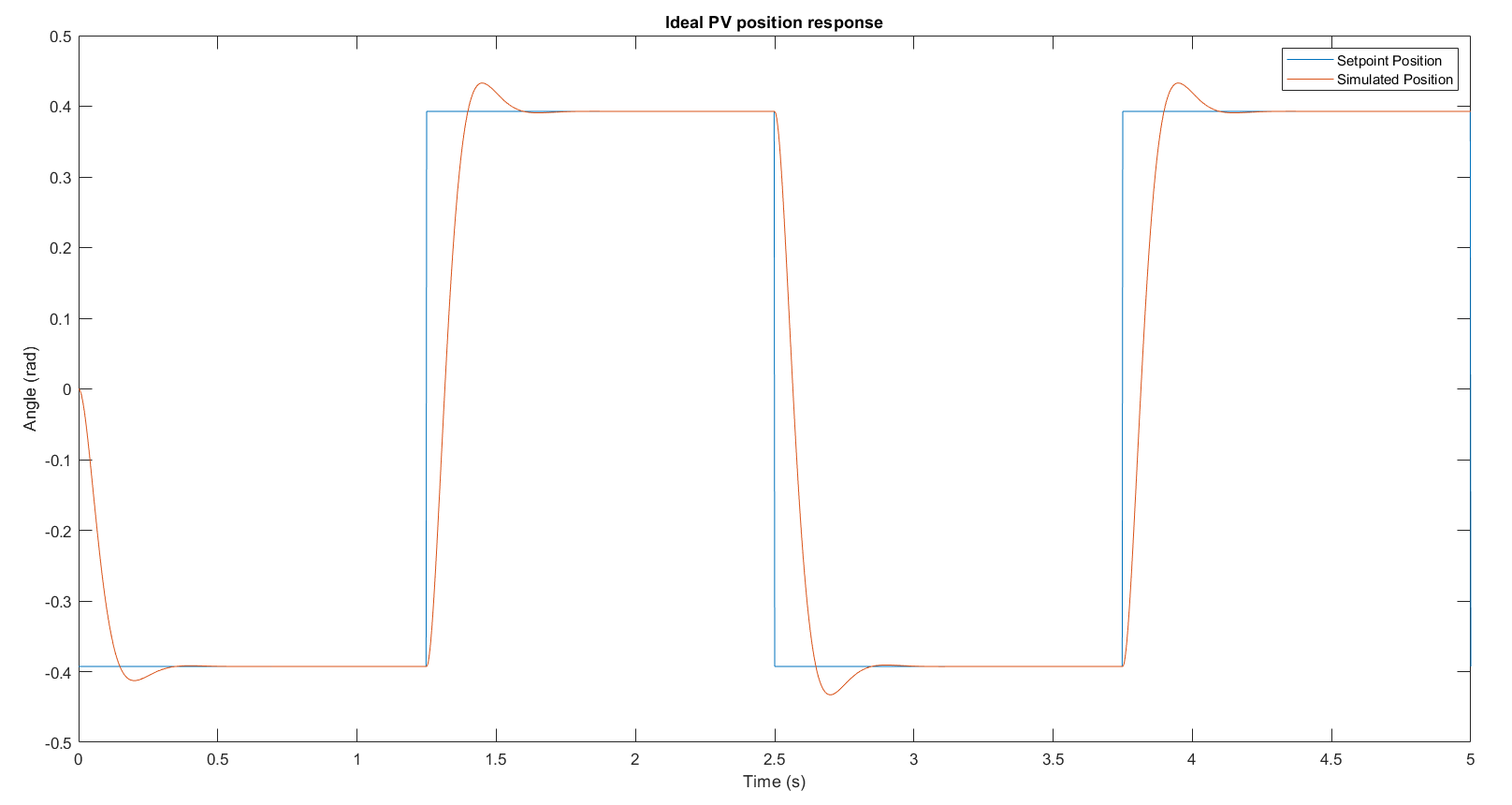
- Design PV (proportional-velocity) controller gains from second-order transient specifications: peak time tp = 0.20 s and percent overshoot PO = 5%
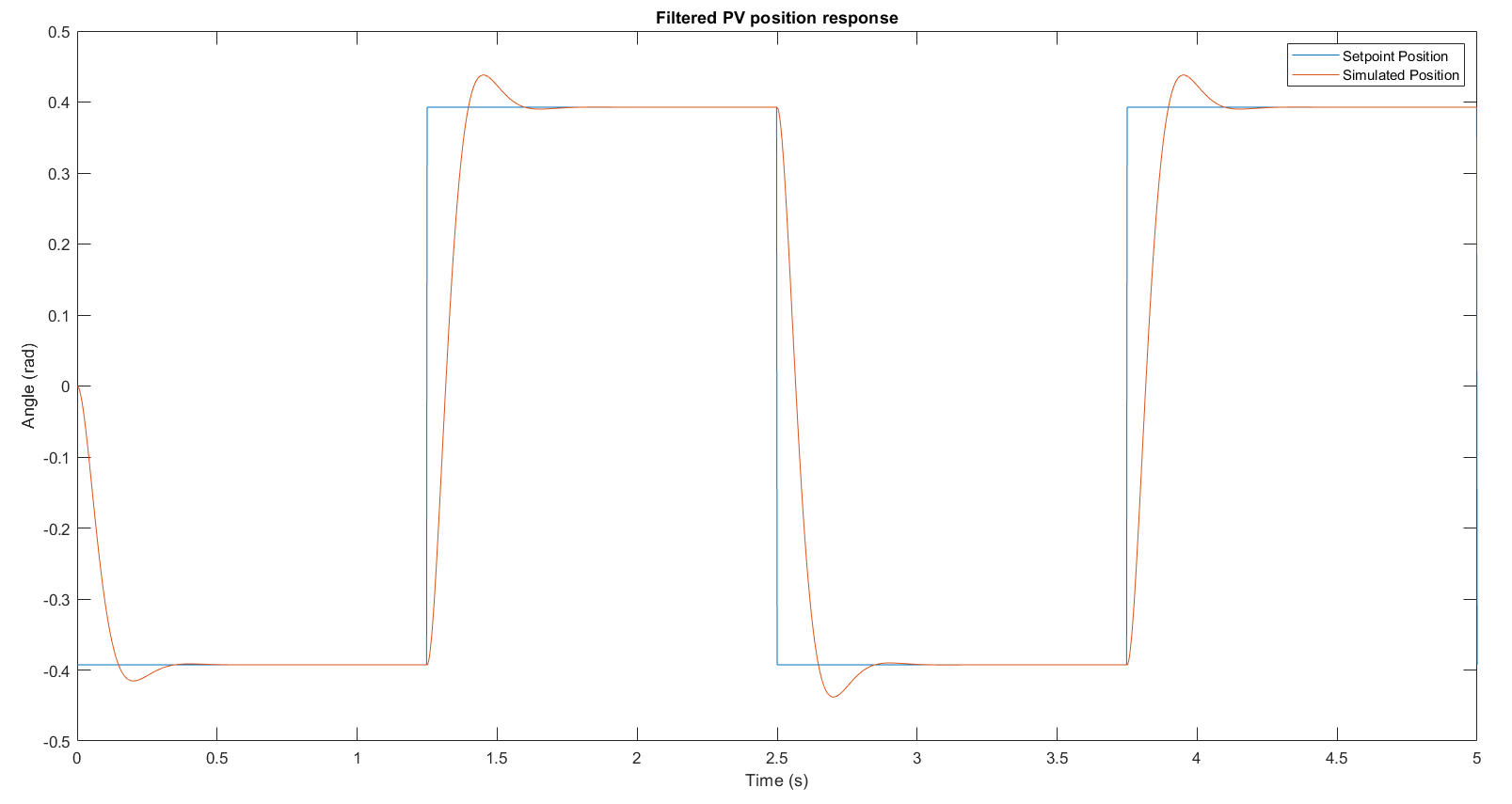
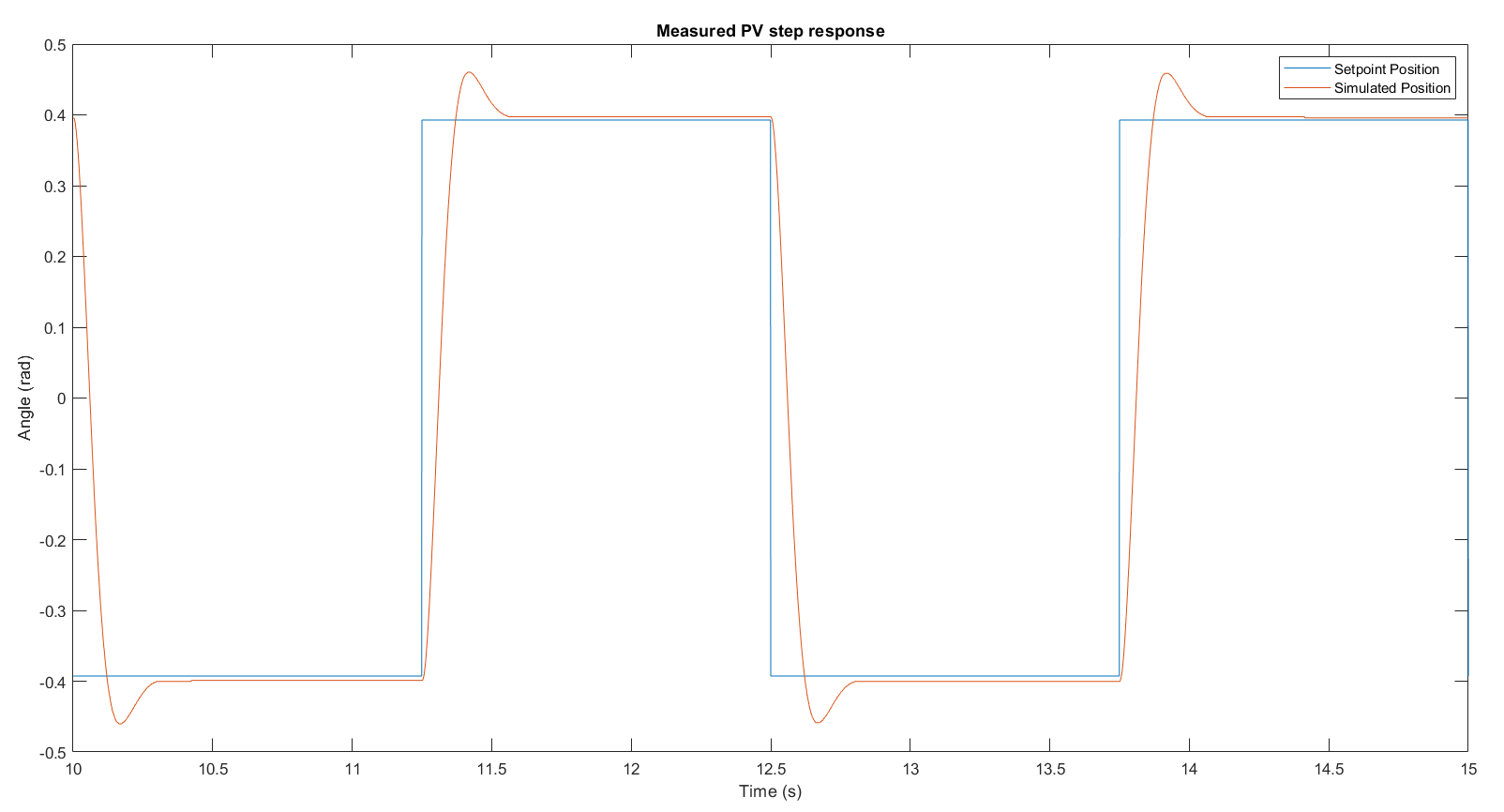
- Validate the step response in simulation and on the physical SRV02 hardware
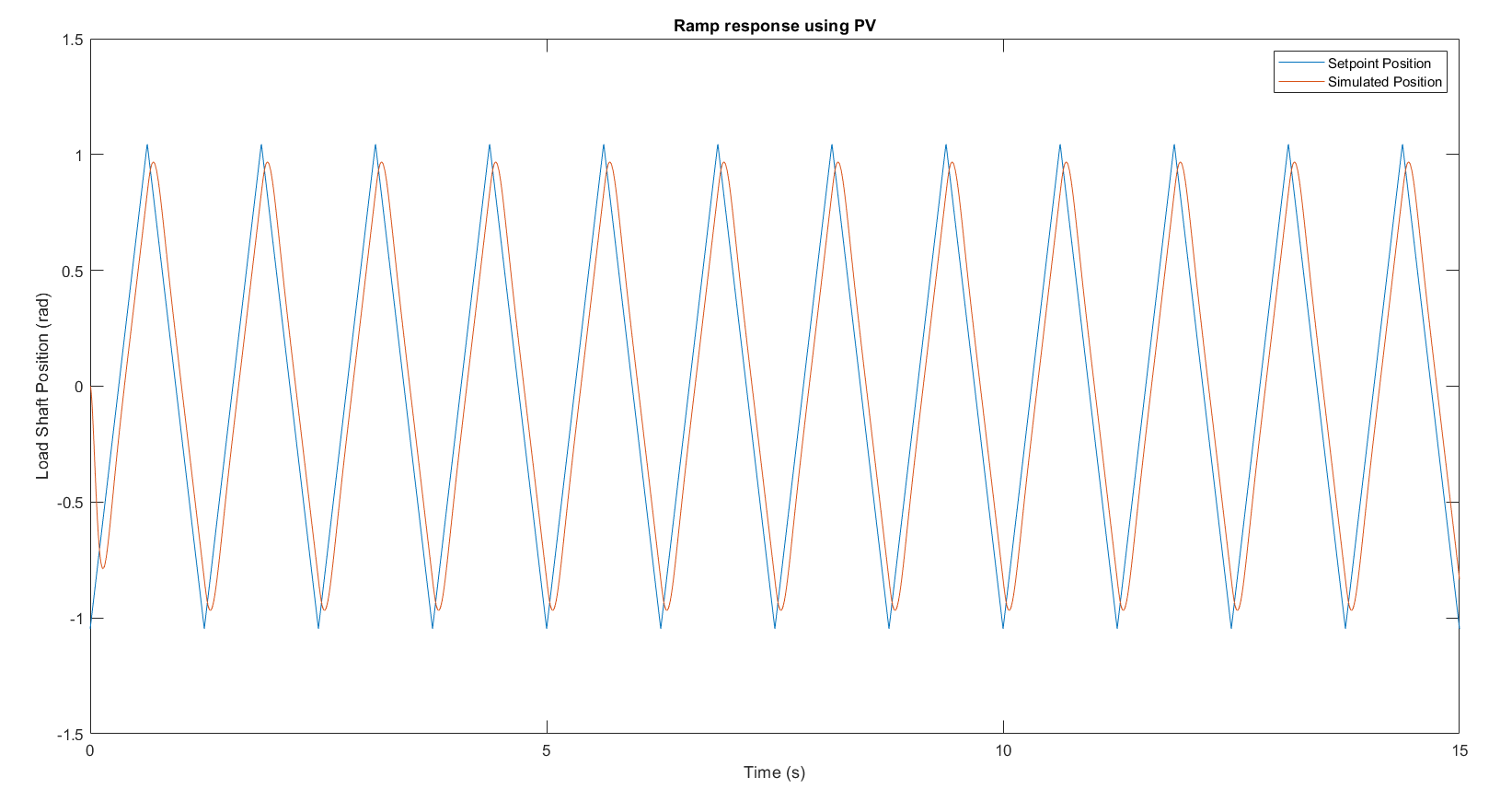
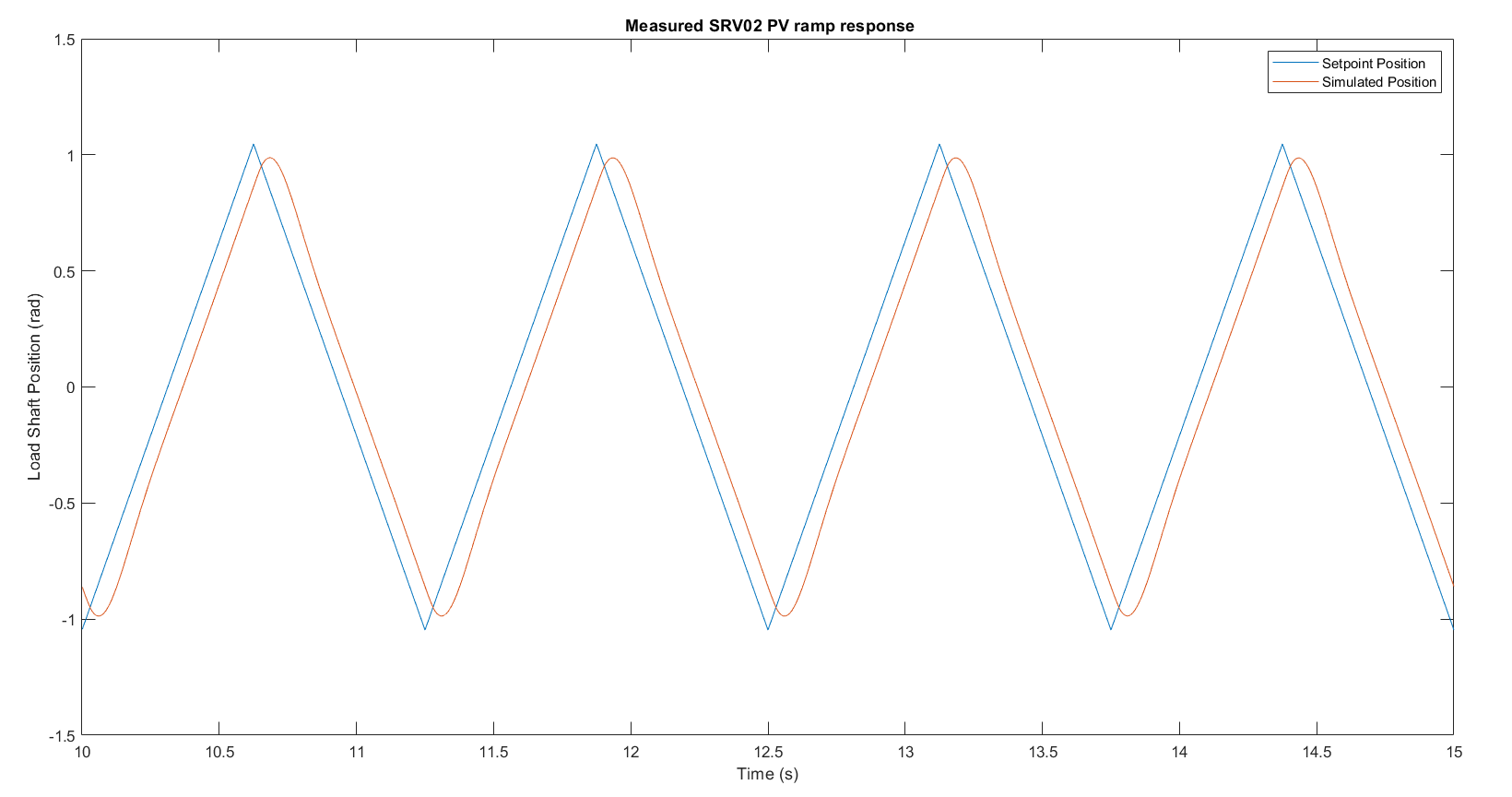
- Demonstrate the ramp tracking steady-state error inherent to PV-only control
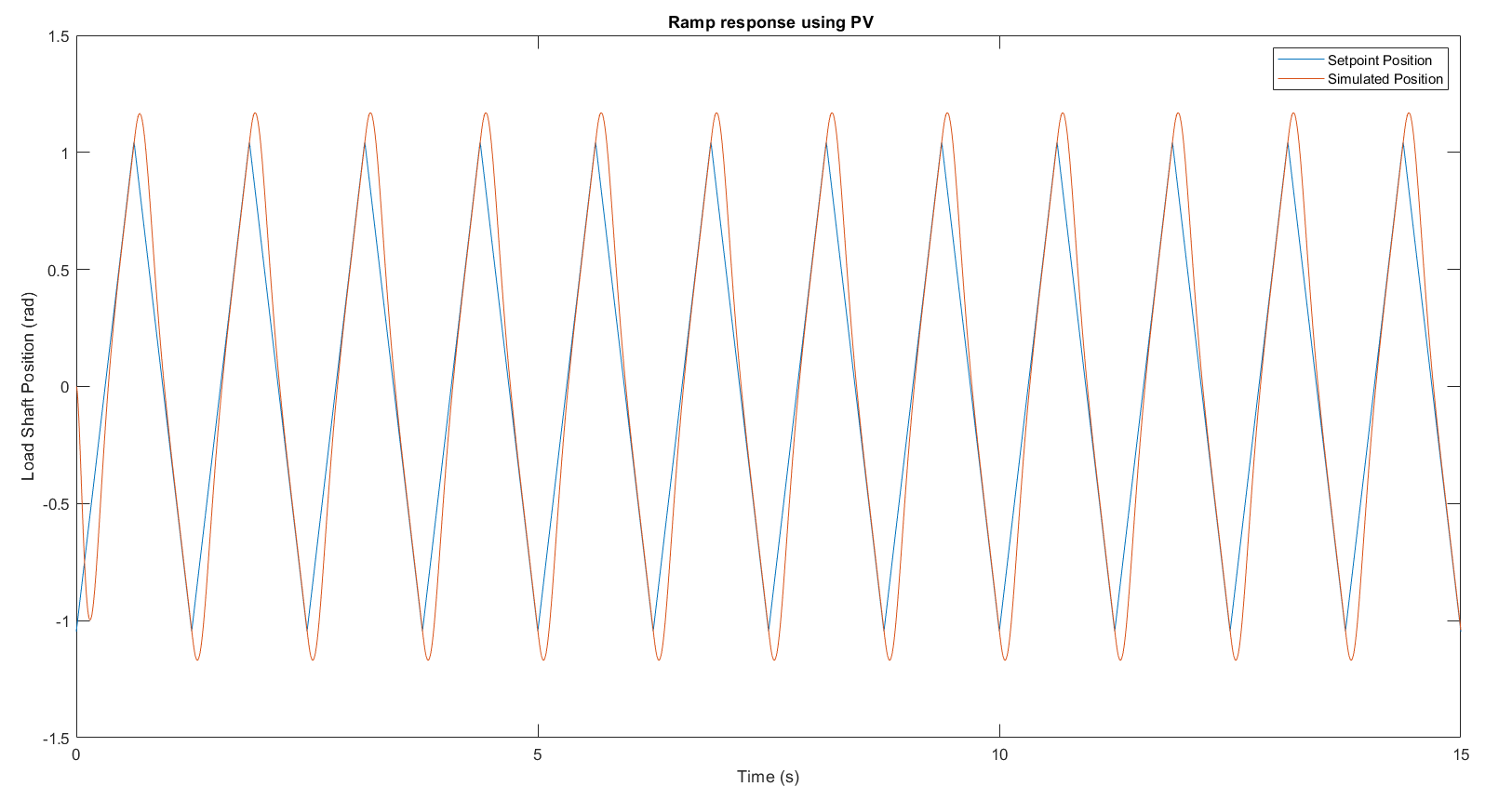
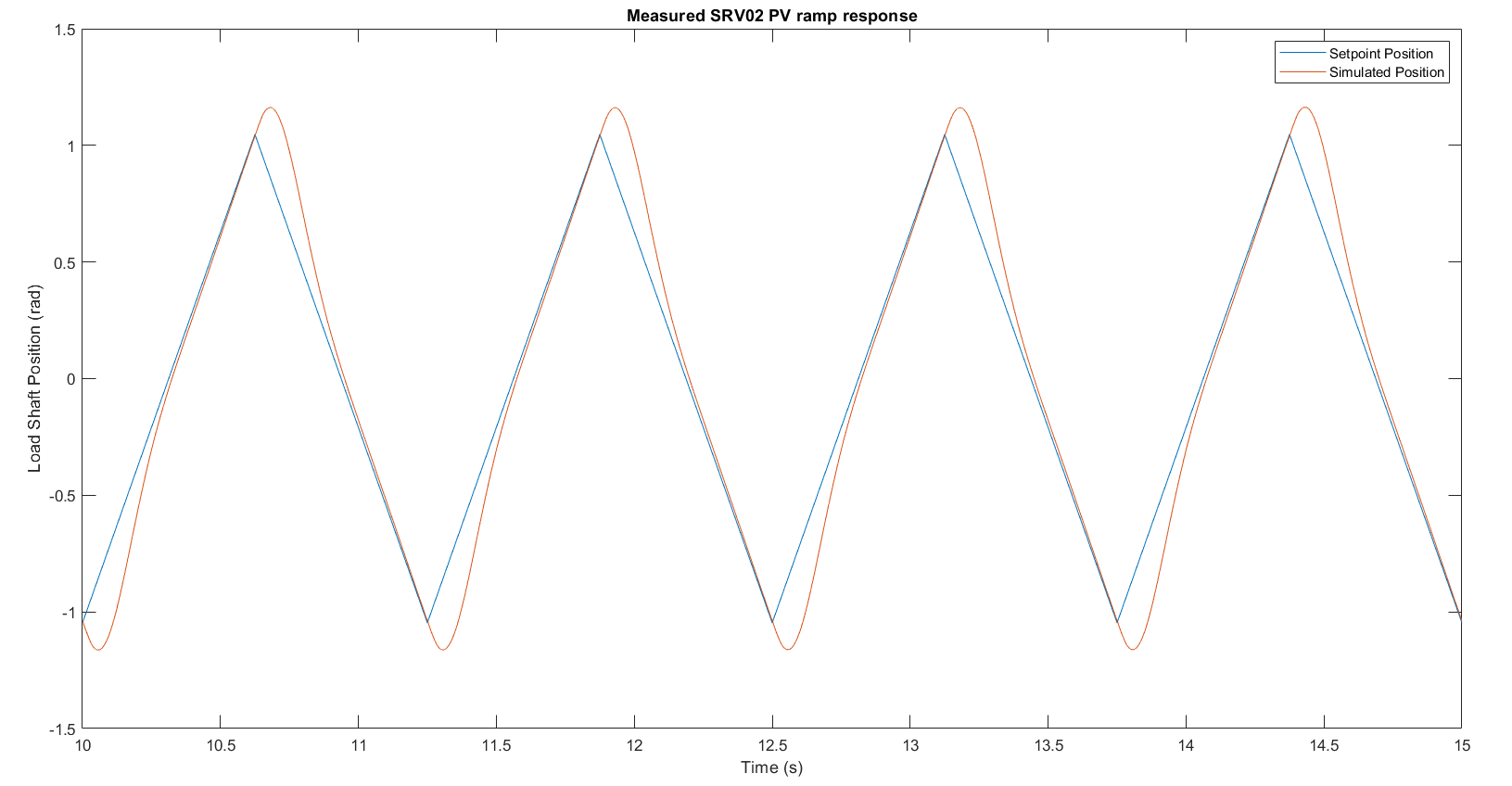
- Add an integral gain to create a PIV controller and reduce ramp steady-state error to near zero